宇树机器人-雷达对接
前言
SDK地址
https://support.unitree.com/home/zh/G1_developer/sdk_overview
上位机连接
https://support.unitree.com/home/zh/G1_developer/quick_development
工单
https://serviceconsole.unitree.com/#/new-work-order?progress=1
Livox Viewer 2查看雷达信息
https://www.livoxtech.com/mid-360/downloads
我这里解压到了
1 | ~/tools/LivoxViewer2 |
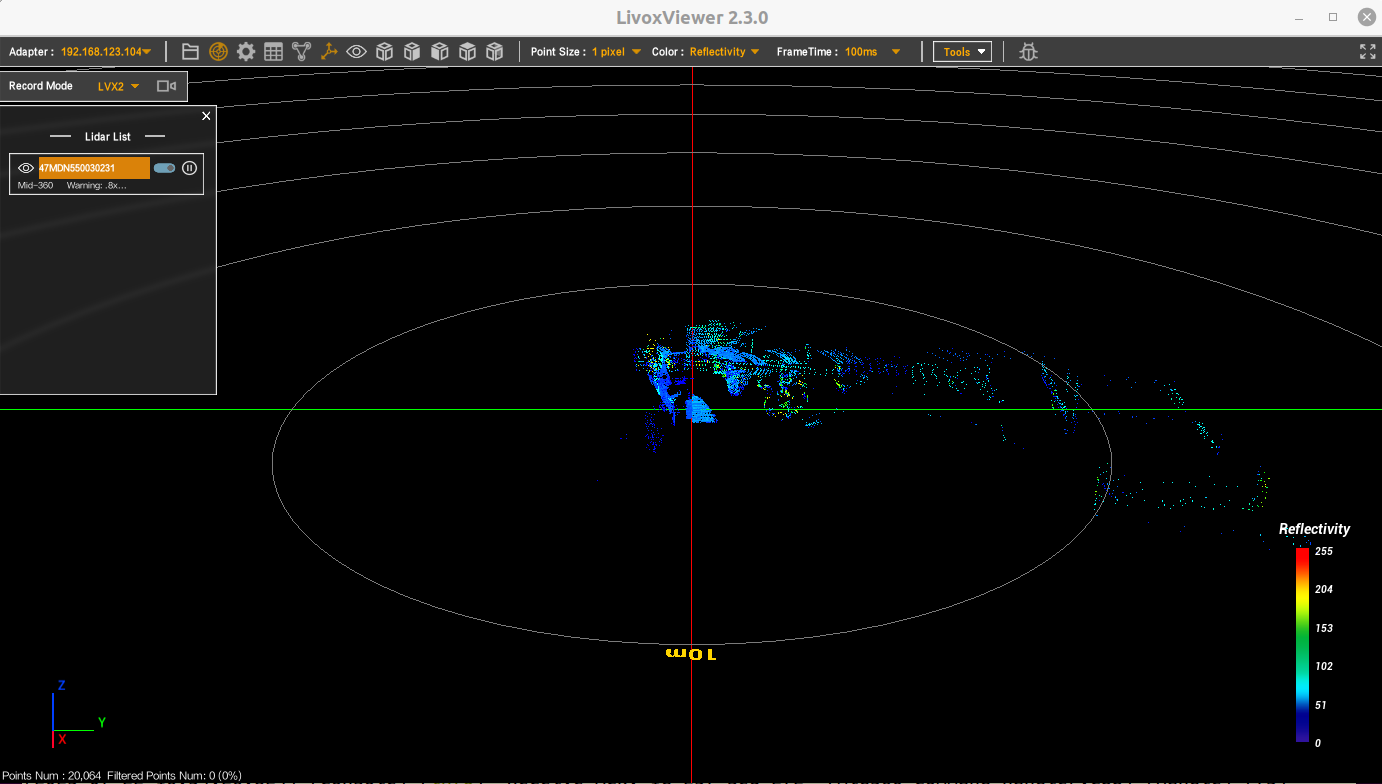
运行
1 | cd ~/tools/LivoxViewer2 |
这时就可以看到数据了
编译安装Livox SDK2
1 | sudo apt install cmake |
编译
1 | cd ~/project/unitree_robot |
安装位置
The generated shared library and static library are installed to the directory of
/usr/local/lib.The header files are installed to the directory of
/usr/local/include.
如果要删除
Remove Livox SDK2:
1 | sudo rm -rf /usr/local/lib/liblivox_lidar_sdk_* |
通过 livox_ros_driver2 获取数据
编译安装livox_ros_driver2
克隆项目
1 | cd ~/project/unitree_robot/unitree_ros2 |
针对 G1 机器人雷达,需要修改/livox_ros_driver2/config/MID360_config.json 文件内的 lidar_configs下的ip 为 192.168.123.120、host_net_info 下的 ip 为主机 ip。
1 | gedit ~/project/unitree_robot/unitree_ros2/ws_livox/src/livox_ros_driver2/config/MID360_config.json |
示例如下
1 | { |
构建
For ROS2 Foxy:
1 | cd ~/project/unitree_robot/unitree_ros2/ws_livox/src/livox_ros_driver2 |
运行
1 | cd ~/project/unitree_robot/unitree_ros2/ws_livox/src/livox_ros_driver2 |
解释:
1 | ros2 launch livox_ros_driver2 [launch file] |
[launch file]指的是安装后的launch_ROS2文件夹下的文件
1 | ~/project/unitree_robot/unitree_ros2/ws_livox/install/livox_ros_driver2/share/livox_ros_driver2/launch_ROS2 |
报错处理
运行报错
Could not load library LoadLibrary error: liblivox_lidar_sdk_shared.so
查找文件是否生成
1 | sudo find / -name liblivox_lidar_sdk_shared.so |
我这里找到
/usr/local/lib/liblivox_lidar_sdk_shared.so
添加环境变量
1 | echo $LD_LIBRARY_PATH |
永久生效
1 | sudo gedit ~/.bashrc |
添加
1 | export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/usr/local/lib |
确保你有足够的权限来访问和加载liblivox_lidar_sdk_shared.so库文件。你可以尝试使用ls -l命令来查看库文件的权限:
1 | ls -l /usr/local/lib/liblivox_lidar_sdk_shared.so |
如果需要,你可以使用chmod命令来修改库文件的权限:
1 | sudo chmod +r /usr/local/lib/liblivox_lidar_sdk_shared.so |
使用ldd命令来检查liblivox_lidar_sdk_shared.so库文件是否缺失依赖:
1 | ldd /usr/local/lib/liblivox_lidar_sdk_shared.so |
查看
我们就可以订阅
- /livox/imu
- /livox/lidar
在新的控制台中查看
1 | # 列出所有话题 |
注意
这个显示的是话题发布者和订阅者的数量,不是消息数。